[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Programa 7.2 OGATA 4edicion pag435
Solapas principales
Vamos a dibujar el lugar de las raices mediante el Scilab de un sistema compensado y no compensado. El sistema en lazo abierto a compensar es el siguinte:
![]()
El sistema de compensacion (compensador de adelanto) obtenido es:
![]()
Programa en Scilab:
clf;
s=%s;
g=1/(s*(s+1)*(s+2));
gc=(s+0.05)/(s+0.005);
gt=gc*g;
gs=syslin('c',g);
gcs=syslin('c',gt);
subplot(3,1,1);
evans(gs);
mtlb_axis([-2.1 0.5 -2 2])
xgrid;
xtitle('no compensado','','eje imaginario');
subplot(3,1,2);
evans(gcs);
mtlb_axis([-2.1 0.5 -2 2])
xgrid;
xtitle('compensado','','eje imaginario');
subplot(3,1,3);
evans(gcs);
mtlb_axis([-2.1 0.5 -0.1 0.1])
xgrid;
xtitle('compensado ampliado','eje real','eje imaginario');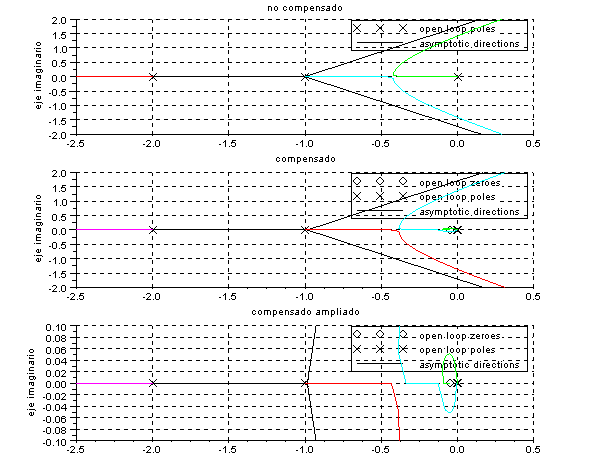
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 9 años 8 meses
- good hace 9 años 8 meses
- Engranajes hace 9 años 9 meses
- REVISAR hace 9 años 9 meses
- UTIL hace 9 años 9 meses
- Realimentación hace 10 años 1 semana
- Hello There. I found your hace 10 años 3 semanas
- Good web site! I really love hace 10 años 3 semanas
- Well I really enjoyed reading hace 10 años 3 semanas
- Thanks again for the blog hace 10 años 3 semanas
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Ejercicio 4.3 (Tiempo de relajacion)
- Programa 5.18 pag 274 con Scilab
- Problema A.5.9 pag 302, Ogata
- Distribucion F-Snedecor (probabilidad menor que)
- Ejercicio 2 Campos y Ondas 1302S2 (Onda plana uniforme; Impedancia intrinseca; Longitud de onda; Velocidad de fase; Velocidad de grupo; Campo electrico )
- Parte practica S.POTENCIA 2014 02 S1 (Tiempo medio de reparacion)
- 2 VISUALIZACION DE DISTINTAS MAGNITUDES ELECTRICAS
- Programa 6.5 OGATA 4edicion pag366 (Lugar de las Raices)
- Cuestion 4 S.POTENCIA 2014 02 S2 (Conveccion forzada por aire)
- Programa 7.5 OGATA 4edicion pag455
- Analisis de una viga con SolidWorks (Ingles)
- Cuestion 2 Campos y Ondas 1402S2 (Lineas en circuito abierto y cortocircuito)
- Ejercicio 3.8(b) Ley de Gauss
- Catalogo de resistencias de alto voltaje, alta potencia y no inductivas o anti-inductivas de EGB RESISTORS (Ingles)
- Examenes de Ecuaciones Diferenciales
- Problema A.5.23 pag 322, Ogata
- Ejercicio 7.2 (Efecto Doppler)
- Ejercicio 5.5 Hambley (NMOS, polarizacion, seguidor de fuente)
- Dibujar una recta en tres dimensiones 3D con SAGE
- Ejercicion 3 (Lugar de las raices estabilidad)
- Ejercicio 3.7(a) Momento dipolar
- Problema A8.14 pag603 OGATA
- Cuestion 10 (Respuesta en frecuencia, emisor comun, condensador de desacoplo
- Integrales trigonometricas
- LATEX
Páginas
Today's popular content
- Curso basico de GeoGebra
- Cálculo de Integrales con GeoGebra
- Documento de Ayuda de GeoGebra 3
- Apuntes de GeoGebra con unos puntos de Mates
- Geogebra 4 en 10 Lecciones
- Definiciones basicas
- CONCEPTOS BASICOS DE MECANISMOS
- EJERCICIOS DE TEORÍA DE MÁQUINAS Y MECANISMOS
- Nociones generales sobre mecanismos
- CLASIFICACIÓN DE LOS MECANISMOS PLANOS
- Mecanismos de Movilidad
- RELACIÓN DE PROBLEMAS DE CINEMÁTICA DE MECANISMOS
- PROGRAMACION
- LATEX
- Apuntes y Enlaces
- Manuales de SolidWorks
- Simulacion de un mecanismo de 4 barras con SolidWorks (Ingles)
- Introduction to SolidWorks
- An Introduction to Engineering Design With SolidWorks
- Analisis de una viga con SolidWorks (Ingles)
- Analisis de una placa con SolidWoks (Ingles)
- Analisis de una valvula de Bola con SolidWorks (Ingles)
- Analisis del coeficiente arrastre(friccion) en un Cilindro con SolidWorks (Ingles)
- Leccion 1 - Fundamentos basicos (Ingles)
- Leccion 2 - Diseño de una pieza cubierta. (Ingles)
Páginas

Añadir nuevo comentario