[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Cuestion 2 (Regulador derivativo, error de posicion): Page 4 of 4
Solapas principales
[adsense:336x280:9156825571]
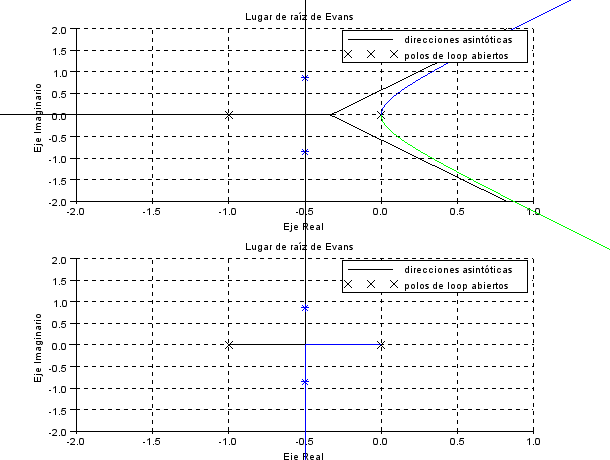
Calculos y comprobaciones con Scilab
//Calculo polo dominante
sig=0.5;
wd=sqrt(1-0.5^2)
s1=-sig+%i*wd
//Calculo del angulo del sistema
s=%s;
g=2/((s+1)*s^2);
gs=syslin('c',g);
aux=horner(gs,s1);
aux1=atan(imag(aux),real(aux));
aux2=360*aux1/(2*%pi)
//Calculo del angulo de la red de adelanto
ac3=180-aux2
//Angulo de un cero en 0 con s1
ac=atan(imag(s1),real(s1));
axc=360*ac/(2*%pi)
//kc del compensador
ax3=horner(s*gs,s1);
abgts1=abs(ax3);
kc=1/abgts1
//Comprobacion de resultados
gc=kc*s;
gt=g*gc;
gts=syslin('c',gt)
gts1=horner(gts,s1)
axgts1=atan(imag(gts1),real(gts1));
agts1=360*axgts1/(2*%pi)
//Lugar de las raices sistema no compensado y compensado
clf;
subplot(2,1,1)
evans(gs)
plot(real(s1),imag(s1),'*');
plot(real(s1),-imag(s1),'*');
xgrid;
mtlb_axis([-2 1 -2 2])
subplot(2,1,2)
evans(gts)
plot(real(s1),imag(s1),'*');
plot(real(s1),-imag(s1),'*');
xgrid;
mtlb_axis([-2 1 -2 2])
Español
Páginas
- « primera
- ‹ anterior
- 1
- 2
- 3
- 4


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 10 años 1 mes
- good hace 10 años 2 meses
- Engranajes hace 10 años 2 meses
- REVISAR hace 10 años 3 meses
- UTIL hace 10 años 3 meses
- Realimentación hace 10 años 5 meses
- Hello There. I found your hace 10 años 6 meses
- Good web site! I really love hace 10 años 6 meses
- Well I really enjoyed reading hace 10 años 6 meses
- Thanks again for the blog hace 10 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Ejercicio 8.15 Hambley (Respuesta en Frecuencia, carga capacitiva)
- APUNTES Y ENLACES
- Dibujar un punto en tres dimensiones con SAGE
- Parte practica S.POTENCIA 2013 09 S2 (Diagrama de fiabilidad)
- Moldeo manual en fundiciones de acero
- Leccion 7 Graficos en Latex
- Respuesta en frecuencia
- Interruptores no controlados: El diodo Rectificador
- What are MEMS/NEMS
- Cálculo de Integrales con GeoGebra
- CARACTERIZACION DE UN ELEVADOR TIPO TIJERA PARA VEHICULOS
- Estabilidad absoluta
- SINTONIZACION DEL SISTEMA DE CONTROL DE VELOCIDAD DE MAQUINAS SINCRONAS
- Parte Teorica S.POTENCIA 2013 Sept S1 (Fiabildad)
- Los diodos y sus aplicaciones.
- Practica 7. Plano en SolidWorks
- Calculo de la divergencia en coordenadas cilindricas de un campo vectorial con SAGE(2)
- IMPORTING CLOCK PENDELUM INTO WORKING MODEL
- Practica 9. Analisis de una Viga con CosmosWorks- SolidWorks
- Ejercicio 1.8 Hambley (Amplificacion, ganancia potencia en decibelios)
- FINAL DE JULIO DE SERVOSISTEMAS
- Practicas de laboratorio
- Ejercicio 5.4 Hambley (NMOS, polarizacion automatica)
- Tema 6: Movimiento relativo
- Analisis de las aceleraciones
Páginas
Today's popular content
- Cuestion 2 EDiferenciales 1406S2 (Ecuacion diferencial lineal de coeficientes constantes)
- Cuestion 3 EDiferenciales 1406S2 (Sistema de ecuaciones diferenciales; Trayectorias; Punto critico; Estabilidad)
- Apartada a) de la cuestion 3 EDiferenciales 1406S2 (Sistema ecuaciones diferenciales; Punto critico; Nodo inestable)
- Apartada b.1) de la cuestion 3 EDiferenciales 1406S2 (Sistema ecuaciones diferenciales; Solucion general)
- Apartada b.2) de la cuestion 3 EDiferenciales 1406S2 (Sistema ecuaciones diferenciales; Ecuacion implicita trayectorias)
- Apartada b.3) de la cuestion 3 EDiferenciales 1406S2 (Sistema ecuaciones diferenciales; Ecuacion implicita trayectorias)
- Campos y Ondas 1402S2
- Cuestion 1 Campos y Ondas 1402S2 (Magnetostatica espacio libre)
- Ejercicio 1 Campos y Ondas 1402S2 (Condensador; Campo electrico, Potencial electrico)
- Campos y Ondas 1402S1
- Cuestion 1 Campos y Ondas 1402S1 (Potencial y campo electrico debido a un dipolo)
- Cuestion 2 Campos y Ondas 1402S1 (Potencial magnetico vector.)
- Apartada a) del Ejercicio 1 Campos y Ondas 1402S2 (Potencial electrico entre placas)
- Apartada b) del Ejercicio 1 Campos y Ondas 1402S2 (Campo electrico entre placas)
- Ejercicio 1 Campos y Ondas 1402S1 (Conductor movil campo magnetico)
- Apartada 1) del Ejercicio 1 Campos y Ondas 1402S1 (Conductor movil campo magnetico)
- Apartada 2) del Ejercicio 1 Campos y Ondas 1402S1 (Conductor movil campo magnetico)
- Apartada 3) del Ejercicio 1 Campos y Ondas 1402S1 (Conductor movil campo magnetico variable)
- Campos y Ondas 1309S2
- Cuestion 1 Campos y Ondas 1309S2 (Dielectrico campo electrico estatico)
- Ejercicio 1 Campos y Ondas 1309S2 (Potencial Magnetico)
- Campos y Ondas 1309S1
- Cuestion 1 Campos y Ondas 1309S1 (Ley de Faraday; Campo magnetico variable)
- Apartada 1) del Ejercicio 1 Campos y Ondas 1309S2 (Potencial magnetico)
- 2.2.1 Calculo teorico variando RL
Páginas

Añadir nuevo comentario